
Background
The human hand plays a crucial role in accomplishing activities of daily living. The contribution of each finger in the human hand is remarkably unique in establishing object stabilization. According to the mechanical advantage hypothesis, the little finger tends to exert a greater normal force than the ring finger during a supination moment production task to stabilize the object. Similarly, during pronation, the index finger produces more normal force when compared with the middle finger. Hence, the central nervous system employs the peripheral fingers for torque generation to establish the equilibrium as they have a mechanical advantage of longer moment arms for normal force. In our study, we tested whether the mechanical advantage hypothesis is supported in a task in which the contribution of thumb was artificially reduced. We also computed the safety margin of the individual fingers and thumb.
Methodology
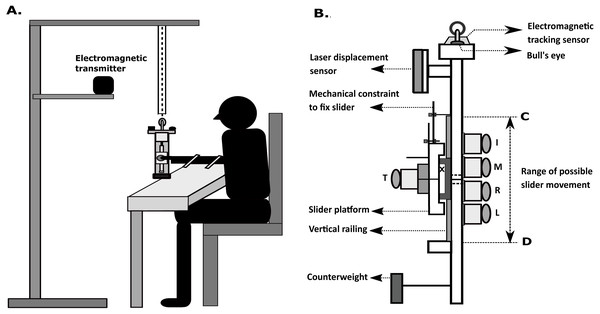
Fifteen participants used five-finger prismatic precision grip to hold a custom-built handle with a vertical railing on the thumb side. A slider platform was placed on the railing such that the thumb sensor could move either up or down. There were two experimental conditions. In the “Fixed” condition, the slider was mechanically fixed, and hence the thumb sensor could not move. In the “Free” condition, the slider platform on which the thumb sensor was placed could freely move. In both conditions, the instruction was to grasp and hold the handle (and the platform) in static equilibrium. We recorded tangential and normal forces of all the fingers.
Results
The distribution of fingertip forces and moments changed depending on whether the thumb platform was movable (or not). In the free condition, the drop in the tangential force of thumb was counteracted by an increase in the normal force of the ring and little finger. Critically, the normal forces of the ring and little finger were statistically equivalent. The safety margin of the index and middle finger did not show a significant drop in the free condition when compared to fixed condition.
Conclusion
We conclude that our results does not support the mechanical advantage hypothesis at least for the specific mechanical task considered in our study. In the free condition, the normal force of little finger was comparable to the normal force of the ring finger. Also, the safety margin of the thumb and ring finger increased to prevent slipping of the thumb platform and to maintain the handle in static equilibrium during the free condition. However, the rise in the safety margin of the ring finger was not compensated by a drop in the safety margin of the index and middle finger.
Δεν υπάρχουν σχόλια:
Δημοσίευση σχολίου